छायाचित्रण भाग ११. उद्भासन मापन आणि मीटरींग
सूची ०१. उद्भासन मापनाची निकड ०२. उद्भासन मापनाचे प्रकार ०३. मिडल ग्रे ०४. इन्सिडंट विरुद्ध रिफ्लेक्टेड लाइट मीटरींग ०५. उद्भासन समायोजन ०६. मीटरींग आणि आय-टीटीएल फ्लॅश
मागील भागात आपण पाहिले छायाचित्रणातील उद्भासन त्रिकोणावर परिणाम करणारे घटक आणि स्तंभालेखाद्वारे उद्भासनाचे मूल्यमापन. आता आपण पाहणार आहोत उद्भासन त्रिकोणाच्या सुयोग्य मूल्यसंगतीचे गणन कसे केले जाते. आधीच्या भागात आपण पाहिले की, आयएसओ स्पीड, अॅपर्चर आणि शटर इन्टर्वल हे तीन घटक कॅमेरा उद्भासन नियंत्रित करतात. पण मग एखाद्या दृश्यासाठी या तिन्ही घटकांची परस्परांशी जुळणारी अचूक मूल्यसंगती (कॉम्बिनेशन) कसे निवडायचे? आणि कॅमेरा जेव्हा ऑटो मोडवर असतो तेव्हा कॅमेरा ही मूल्यसंगती कसा ठरवतो?
उद्भासन मापनाची निकड
उद्भासन मापन (Exposure Measurement) म्हणजे काय? कुठल्याही दृश्यात शक्यतो वेगवेगळ्या प्रकाशमानतेचे वेगवेगळे घटक उपस्थित असतात. उद्भासन म्हणजेच अॅपर्चर-शटर-आयएसओ यांची मूल्यसंगती ही मात्र संपूर्ण दृश्यासाठी एकच वापरली जाते. उदा. f/2.8-1/250s-ISO400 इत्यादी. पण प्रत्येक घटकाची प्रकाशमानता वेगवेगळी असल्याने संपूर्ण दृश्यासाठी वापरलेले उद्भासन हे सर्व घटकांना समानपणे उद्भासित करू शकणार नाही. छायाचित्रणाच्या दृष्टीने या इतक्या वेगवेगळ्या घटकांमधून छायाचित्रणाचा केंद्रबिंदू असलेले मुख्य घटक ओळखणे आणि त्या घटकांची प्रकाशमानता मोजून तेच घटक अचूकपणे उद्भासित करणे महत्त्वाचे असते. ही प्रकाशमानता मोजणे व त्यानुसार अॅपर्चर-शटर-आयएसओ यांची सुयोग्य मूल्यसंगती ठरवणे याला उद्भासन मापन असे म्हणतात.उद्भासन मापनाची गरज का पडते, तर आपण निवडलेले उद्भासन (Exposure) हे 'अचूक' आहे की नाही हे ठरवणे थोडे सापेक्ष असते. कारण अचूक उद्भासन म्हणजे ते उद्भासन जे छायाचित्रकाराला अपेक्षित असा परिणाम प्रतिमेत टिपण्यासाठी मदत करते. उदा. एखादी छायाचित्रकार ही व्यक्तींच्या अंधारआकृत्या (silhouttes) टिपायचा प्रयत्न करत असेल, पण कॅमेरा तिला जास्त उद्भासन ठेव, तू निवडलेले उद्भासन हे अंडरएक्स्पोजर आहे असे शहाणपण शिकवत असेल तर भलेही कॅमेर्याच्या दृष्टीने तो काय सांगतोय हे बरोबर असेल. पण छायाचित्रकाराला अपेक्षित असा सावल्यांचा परिणाम त्या प्रतिमेत आला नाही तर मग अशा एक्स्पोजरचा काय फायदा! इथे काय चुकतेय हे सांगू शकाल का कोणी? हरकत नाही. लेख संपूर्ण वाचल्यावर त्या छायाचित्रकाराने कसे मीटरींग करायला हवे होते हे तुम्ही स्वतःच सांगू शकाल.
उद्भासन मापनाचे प्रकार
उद्भासन मापनामध्ये संवेदनशीलता संतुलन हा एक महत्त्वाचा भाग आहे. संवेदनशीलता संतुलन (Sensitivity Weighting) म्हणजे प्रतिमेच्या वेगवेगळ्या भागांपैकी कुठल्या भागाची प्रकाशमानता (Luminance) इतर भागांच्या तुलनेत जास्त प्रमाणात विचारात घ्यायची हा निर्णय. कॅमेर्यातील बिल्ट-इन एक्स्पोजर मीटर किंवा इतर मीटर हे त्यांच्यावर पडणार्या प्रकाशावरून समोरील दृश्याची प्रकाशमानता ठरवतात. पण कुठलेही दृश्य अपवाद वगळता सगळीकडे एकसारखे प्रकाशित नसते. काही भाग अंधारलेला तर काही भाग लख्ख उजेडातही असू शकतो. उदा. व्यक्तिचित्रामध्ये व्यक्तीचे डोळे गडद तर दात शुभ्र असू शकतात. संवेदनशीलता संतुलनामध्ये प्रतिमेतील सर्व प्रखर व गडद भागांची एक प्रकारे गोळाबेरीज केली जाते आणि सर्व भागातील प्रकाशाला योग्य न्याय देणारे एकच सुवर्णमध्यरूपी वाचन (Reading) सुचवले जाते. प्रतिमेच्या कुठल्या भागांची प्रकाशमानता हे गणित करताना विचारात घेतली जाते यावरून उद्भासन मापनाचे विविध प्रकार पडतात.
 निकॉन व कॅनन यांची वेगवेगळ्या मीटरींग मोडसाठीची चिन्हे (Copyrighted to respective brands)
निकॉन व कॅनन यांची वेगवेगळ्या मीटरींग मोडसाठीची चिन्हे (Copyrighted to respective brands)
अ) स्पॉट मीटरींग
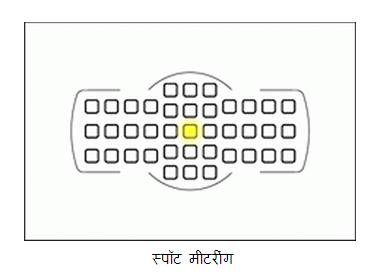 स्पॉट मीटरींग हे नावाप्रमाणेच प्रतिमेतील एका अतिशय छोट्याशा भागाची प्रकाशमानता विचारात घेते आणि त्या भागाला व्यवस्थित उद्भासित करण्यासाठी कोणते सेटिंग योग्य ठरेल याचे गणित मांडून त्याप्रमाणे उद्भासन त्रिकोणाची मूल्यसंगती सुचवते. स्पॉट मीटरींगमध्ये मापनासाठी विचारात घेतला जाणारा भाग हा अतिशय छोटा असतो - साधारणपणे मूळ प्रतिमेच्या १ ते ३% इतकाच.
स्पॉट मीटरींग हे नावाप्रमाणेच प्रतिमेतील एका अतिशय छोट्याशा भागाची प्रकाशमानता विचारात घेते आणि त्या भागाला व्यवस्थित उद्भासित करण्यासाठी कोणते सेटिंग योग्य ठरेल याचे गणित मांडून त्याप्रमाणे उद्भासन त्रिकोणाची मूल्यसंगती सुचवते. स्पॉट मीटरींगमध्ये मापनासाठी विचारात घेतला जाणारा भाग हा अतिशय छोटा असतो - साधारणपणे मूळ प्रतिमेच्या १ ते ३% इतकाच.
स्पॉट मीटरींगचे वैशिष्ट्य म्हणजे त्याची अचूकता. प्रतिमेतील इतर भागाचा स्पॉट मीटरींगवर काहीच परिणाम होत नसल्याने स्पॉट मीटरींगचा वापर एखादी प्रगत छायाचित्रकार अतिशय रचनात्मकतेने व कलात्मकतेने करू शकते. उदा. हाय कॉन्ट्रास्ट सीन, हाय-की प्रकाशयोजना, धूसर परिदृश्य उदा. वाळवंटातील वाळूच्या वादळापासून बचाव करणारा गडद कपड्यातील स्त्रियांचा समूह, पक्षीछायाचित्रणातील पक्ष्याच्या तोंडावर किंवा पंखावर मीटरींग करणे, पॅनिंग प्रकारच्या छायाचित्रणात सापेक्ष स्थिर राहणारी विषयवस्तू, वगैरे. स्पॉट मीटरींगचा सर्वात जास्त वापर हा बॅकलिट पोर्ट्रेट्ससाठी केला जातो. इथे मॉडेलच्या मागून प्रकाश येत असल्याने चेहरा अंधुक दिसतो, तर केसांच्या कडा कुठल्या प्रभावळीसारख्या चमकदार दिसतात. अशावेळी मॉडेलच्या चेहर्यावरील परावर्तित प्रकाशाचे स्पॉट मीटरींग करून चेहरा योग्य तितका उजळेल असे उद्भासन मिळवले जाते.
ब) पार्शल मीटरींग
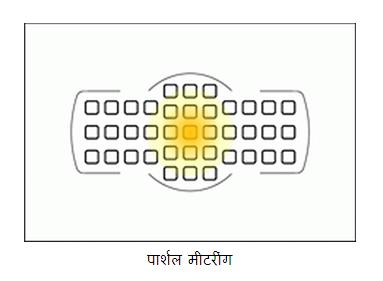 पार्शल मीटरींगमध्ये स्पॉट मीटरींगपेक्षा चौकटीचा थोडा जास्त भाग विचारात घेतला जातो - सुमारे १० ते १५%. पार्शल मीटरींगचा फायदा जास्त करून प्रतिमेच्या कडेजवळ एखादा अतिशय प्रखर किंवा गडद भाग असेल तर योग्य उद्भासन शोधण्यासाठी होतो. उदा. झाडांच्या पानांतून डोकावणारे सूर्यकिरण किंवा मिडपोर्ट्रेटमध्ये सिंगल लाइट सोर्स वापरला असेल व तोही चौकटीत कुठे येत असेल तर पार्शल मीटरींग उपयोगी ठरते. अजून एक म्हणजे जिथे स्पॉट मीटरींग नेमके प्रतिमाचौकटीच्या कुठल्या भागावर करावे हे निश्चित करता येत नसेल तर पार्शल मीटरींग जास्त कामाला येते. पार्शल मीटरींग हे शक्यतो कॅननच्या कॅमेर्यांत दिसून येते.
पार्शल मीटरींगमध्ये स्पॉट मीटरींगपेक्षा चौकटीचा थोडा जास्त भाग विचारात घेतला जातो - सुमारे १० ते १५%. पार्शल मीटरींगचा फायदा जास्त करून प्रतिमेच्या कडेजवळ एखादा अतिशय प्रखर किंवा गडद भाग असेल तर योग्य उद्भासन शोधण्यासाठी होतो. उदा. झाडांच्या पानांतून डोकावणारे सूर्यकिरण किंवा मिडपोर्ट्रेटमध्ये सिंगल लाइट सोर्स वापरला असेल व तोही चौकटीत कुठे येत असेल तर पार्शल मीटरींग उपयोगी ठरते. अजून एक म्हणजे जिथे स्पॉट मीटरींग नेमके प्रतिमाचौकटीच्या कुठल्या भागावर करावे हे निश्चित करता येत नसेल तर पार्शल मीटरींग जास्त कामाला येते. पार्शल मीटरींग हे शक्यतो कॅननच्या कॅमेर्यांत दिसून येते.
क) सेंटर-वेटेड अॅवरेज मीटरींग
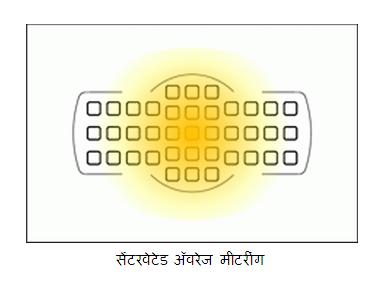 सेंटर-वेटेड अॅवरेज मीटरींग हा नावाप्रमाणेच पार्शल मीटरींगपेक्षा जास्त पण तरीही चौकटीच्या सर्वच भागांना समान वेटेज न देता मध्यभागाला जास्त प्राधान्य देणारा एक्स्पोजर मोड आहे. या मोडमध्ये प्रतिमाचौकटीच्या मध्यभागापासून सुमारे ६०-७०% भागाचे मीटरींग केले जाते. तेही अशा प्रकारे केले जाते की प्रतिमेच्या मध्याला सर्वात जास्त वेटेज मिळावे. जसजसे मध्यापासून दूर जातो तसतसा मीटरींगवरील त्या भागाचा प्रभाव कमी होत जातो. म्हणून सेंटर-वेटेड अॅवरेज मीटरींग असे नाव.
सेंटर-वेटेड अॅवरेज मीटरींग हा नावाप्रमाणेच पार्शल मीटरींगपेक्षा जास्त पण तरीही चौकटीच्या सर्वच भागांना समान वेटेज न देता मध्यभागाला जास्त प्राधान्य देणारा एक्स्पोजर मोड आहे. या मोडमध्ये प्रतिमाचौकटीच्या मध्यभागापासून सुमारे ६०-७०% भागाचे मीटरींग केले जाते. तेही अशा प्रकारे केले जाते की प्रतिमेच्या मध्याला सर्वात जास्त वेटेज मिळावे. जसजसे मध्यापासून दूर जातो तसतसा मीटरींगवरील त्या भागाचा प्रभाव कमी होत जातो. म्हणून सेंटर-वेटेड अॅवरेज मीटरींग असे नाव.
सेंटर-वेटेड मोड हा बर्याच प्रकाशयोजनांना लागू पडत असल्याने मल्टीझोन मीटरींग येण्याआधी सेंटर-वेटेड अॅवरेज मीटरींग मोड हा छायाचित्रकारांचा लाडका मोड होता. आता बव्हंशी छायाचित्रकार हे मल्टीझोन मीटरींगला प्राधान्य देताना दिसतात.
ड) अॅवरेज मीटरींग
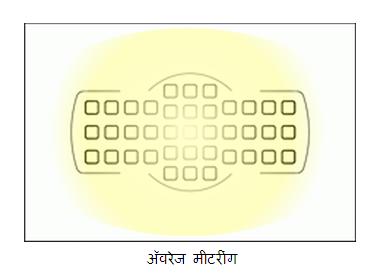 या मोडमध्ये नावाप्रमाणेच प्रतिमेच्या जवळजवळ संपूर्ण चौकटीचे मीटरींग केले जाते. या मोडमध्ये कुठल्याही एका भागाला इतर प्रतिमेच्या तुलनेत जास्त प्राधान्य मिळत नाही. तुमच्या लक्षात आले असेल की, अशी आदर्श परिस्थिती छायाचित्रणात दुर्मिळ असते. रचनाविचारावरील लेखात आपण वैधम्य्र वापरून कॉम्पोजिशन कसे करायचे ते पाहिले. अशा परिस्थितीत अॅवरेज मीटरींग तितकेसे उपयोगी ठरणार नाही. लो-की प्रकाशयोजनेत मात्र अॅवरेज मीटरींगचा वापर करून घेता येईल.
या मोडमध्ये नावाप्रमाणेच प्रतिमेच्या जवळजवळ संपूर्ण चौकटीचे मीटरींग केले जाते. या मोडमध्ये कुठल्याही एका भागाला इतर प्रतिमेच्या तुलनेत जास्त प्राधान्य मिळत नाही. तुमच्या लक्षात आले असेल की, अशी आदर्श परिस्थिती छायाचित्रणात दुर्मिळ असते. रचनाविचारावरील लेखात आपण वैधम्य्र वापरून कॉम्पोजिशन कसे करायचे ते पाहिले. अशा परिस्थितीत अॅवरेज मीटरींग तितकेसे उपयोगी ठरणार नाही. लो-की प्रकाशयोजनेत मात्र अॅवरेज मीटरींगचा वापर करून घेता येईल.
इ) मल्टिझोन इव्हॅल्युएशन मीटरींग
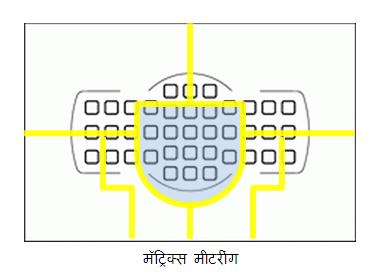 याला वेगवेगळ्या कॅमेरा ब्रॅण्डनुसार वेगवेगळी नावे आहेत. निकॉन या मोडला मॅट्रिक्स मीटरींग म्हणते तर कॅनन इव्हॅल्युएटिव मीटरींग. इतर कॅमेरे उत्पादक याच मोडला हनिकोम्ब मीटरींग, सेगमेंट मीटरींग, सिलेक्टीव पॅटर्न मीटरींग अशी गोंडस नावे देतात आणि प्रत्येकजण आपणच कसे अचूक मीटरींग करतो याचा दावा करतो. निकॉन FA ह्या कॅमेर्यामध्ये सर्वप्रथम मल्टिझोन इव्हॅल्युएटिव मीटरींग प्रणाली वापरली गेली. मल्टिझोन मीटरींग पद्धतीत कॅमेरा स्पॉट मीटरींगचा वापर करतो. पण हे स्पॉट मीटरींग एकाच वेळी प्रतिमेच्या वेगवेगळ्या भागांवरून घेतले जाते. या सर्व वाचनांना विशिष्ट प्रकारे एकत्र केले जाते, त्यांचे विश्लेषण केले जाते आणि मग खास अल्गोरिदम वापरून योग्य उद्भासनमापन ठरवले जाते. यात किती झोन असतात, ते कुठे असतात, त्यांचा पॅटर्न काय असतो, त्यांचे स्पॉट मीटरींग कसे केले जाते, ही सर्व वाचने एकत्र कशी केली जातात, त्यांचा परस्परांशी संबंध कसा ठरवला जातो, मग एक नमुना उद्भासन आकडेमोड करून कसे काढले जाते हे सर्व प्रत्येक उत्पादकानुसार बदलते. तसेच त्यात ट्रेड सिक्रेट हाही प्रकार येतो. ही आकडेमोड पुनःपुन्हा केली जाऊ शकते, तसेच मल्टिझोन असले तरी कुठल्या झोनला जास्त प्राधान्य द्यायचे व कुठल्या झोनला कमी हेही कॅमेरा प्रत्येक वेळी स्वतंत्रपणे ठरवतो.
याला वेगवेगळ्या कॅमेरा ब्रॅण्डनुसार वेगवेगळी नावे आहेत. निकॉन या मोडला मॅट्रिक्स मीटरींग म्हणते तर कॅनन इव्हॅल्युएटिव मीटरींग. इतर कॅमेरे उत्पादक याच मोडला हनिकोम्ब मीटरींग, सेगमेंट मीटरींग, सिलेक्टीव पॅटर्न मीटरींग अशी गोंडस नावे देतात आणि प्रत्येकजण आपणच कसे अचूक मीटरींग करतो याचा दावा करतो. निकॉन FA ह्या कॅमेर्यामध्ये सर्वप्रथम मल्टिझोन इव्हॅल्युएटिव मीटरींग प्रणाली वापरली गेली. मल्टिझोन मीटरींग पद्धतीत कॅमेरा स्पॉट मीटरींगचा वापर करतो. पण हे स्पॉट मीटरींग एकाच वेळी प्रतिमेच्या वेगवेगळ्या भागांवरून घेतले जाते. या सर्व वाचनांना विशिष्ट प्रकारे एकत्र केले जाते, त्यांचे विश्लेषण केले जाते आणि मग खास अल्गोरिदम वापरून योग्य उद्भासनमापन ठरवले जाते. यात किती झोन असतात, ते कुठे असतात, त्यांचा पॅटर्न काय असतो, त्यांचे स्पॉट मीटरींग कसे केले जाते, ही सर्व वाचने एकत्र कशी केली जातात, त्यांचा परस्परांशी संबंध कसा ठरवला जातो, मग एक नमुना उद्भासन आकडेमोड करून कसे काढले जाते हे सर्व प्रत्येक उत्पादकानुसार बदलते. तसेच त्यात ट्रेड सिक्रेट हाही प्रकार येतो. ही आकडेमोड पुनःपुन्हा केली जाऊ शकते, तसेच मल्टिझोन असले तरी कुठल्या झोनला जास्त प्राधान्य द्यायचे व कुठल्या झोनला कमी हेही कॅमेरा प्रत्येक वेळी स्वतंत्रपणे ठरवतो.
या सर्व गुणाकार-भागाकाराच्या गोंधळात इतरही अनेक घटक लक्षात घेतले जातात. उदा. विषयवस्तूचे कॅमेर्यापासूनचे अंतर. (आपण लेन्सवरील भागात सीपीयू आणि नॉन-सीपीयू लेन्स प्रकार पाहिले होते. प्रत्येक लेन्स ही 'डिस्टन्स-टू-सब्जेक्ट' कॅमेर्याच्या प्रोसेसिंग इंजिनपर्यंत पोहोचवते असे नाही. त्यासाठी लेन्स सीपीयू प्रकारची असणे आणि तुमच्या कॅमेरा मॉडेलशी कंपॅटिबल असणे महत्त्वाचे असते. ह्याच कारणाने लेन्स कंपॅटिबिलिटी तक्त्यांमध्ये मल्टिझोन मीटरींग त्या लेन्सवर चालेल की नाही ते दर्शवलेले असते. लेन्सेस घेताना किती बारकाईने विचार करावा लागतो हे ह्यावरून कळून यावे.) त्याचबरोबर कुठले ऑटोफोकस पॉइंट वापरले आहेत (आधुनिक कॅमेर्यांना एकापेक्षा जास्त ऑटोफोकस पॉइंट असतात. उदा. ३९, ५१ इत्यादी.), संकेंद्रीकरण कक्षेतील व बाहेरील भाग, प्रत्येक झोनची प्रखरता आणि वैधम्र्य, प्रकाशाची दिशा, फ्लेअर, हायलाइट्स, ब्लॅक पॉइंट वगैरे अनेक घटक हे मल्टिझोन मीटरींगमध्ये लक्षात घेतले जातात. ज्या झोनमध्ये ऑटोफोकस पॉइंट आहेत आणि जिथे संकेंद्रीकरण व्यवस्थित झालेय तिथे विषयवस्तूचा सर्वात महत्त्वाचा भाग असावा असे गृहित धरून अशा झोनच्या वाचनांना गणनप्रकियेत प्राधान्य दिले जाते. ह्या भागांचे उद्भासन सुयोग्य मध्यम असे होईल या दृष्टीने सर्वांगीण मीटरींग ठरवले जाते. हे सर्व करतानाच कॅमेर्यात आधीच साठवून ठेवलेल्या हजारो नमुना प्रतिमांचा विदा सध्याच्या दृश्याशी पडताळून पाहण्यात येतो आणि जास्तीत जास्त साम्य असणार्या प्रतिमेच्या उद्भासनमाहितीशी हे मीटरींग ताडून पाहिले जाते. एवढी सर्व प्रकिया केल्यानंतर शेवटी कॅमेरा त्याला योग्य वाटलेले उद्भासन मूल्य तुम्हांला सांगतो. हा मोड सुमारे ९०-९५% पेक्षा जास्त वेळा अचूक उद्भासन देतो. त्यामुळे आजकालच्या सर्व आधुनिक कॅमेर्यांमध्ये मल्टिझोन मीटरींग मोड हा डिफॉल्ट मोड असतो.
डिफॉल्ट मोड असला तरी प्युरिटन प्रकारच्या किंवा फिल्मच्या जमान्यातल्या कर्मठ छायाचित्रकारांना हा मोड तितकासा आवडत नाही. त्यांचे म्हणणे असे की ह्या मोडमध्ये कॅमेरा काय विचार करतोय याचा अंदाज बांधता येत नाही. आणि ते खरेही आहे. कारण मल्टिझोन मोडमध्ये कॅमेरा उद्भासन कसे शोधतो हे प्रत्येक कॅमेरा उत्पादकानुसार बदलते. त्याचप्रमाणे प्रत्येक मॉडेलनुसार आणि मॉडेलच्या नवेपणावरही बदलते. एकच मॉडेल असेल तरी बनवण्याची बॅच वेगळी असेल व मध्ये कालावधी बराच लोटला असेल तरी त्यातील मीटरींग अल्गोरिदम आणि नमुना छायाचित्रांचा विदा बदललेला असण्याची शक्यता असते. मल्टिझोन मीटरींग हमखास गंडताना मी पाहिलंय ते अपुर्या प्रकाशात फ्लॅश वापरून ग्रुप पोर्ट्रेट्स घेताना. फ्लॅशचा आणि मीटरींगचा काय संबंध हे नंतर पाहूयाच म्हणा.
वर आपण पाहिलेत की मल्टिझोन मीटरींगमध्ये विषयवस्तूचे कॅमेर्यापासूनचे अंतर, संकेंद्रीकरण, प्रखरता, वैधम्र्य, हायलाइट्स वगैरे अनेक गोष्टी विचारात घेतल्या जातात. पण मग रंगाचे काय? एखाद्या दृश्याच्या रंगछटा ह्या मीटरींगवर कितपत प्रभाव टाकतात याबद्दल कॅमेराउत्पादकांमध्ये एकवाक्यता नाही. पारंपारिक मीटरींगमध्ये मीटरला समोरचे दृश्य फक्त कृष्णधवल रंगांत दिसते. दुसर्या शब्दांत, मीटरींग हे समोरच्या दृश्याला कृष्णधवल मानून त्याचे वाचन (रीडिंग) घेते. निकॉनने मात्र सर्वप्रथम रंगीत मीटरींगची सुरुवात केली. या प्रकारच्या मीटरींगमध्ये इतर घटकांबरोबरच विषयवस्तूचे कॅमेर्यापासूनचे अंतर आणि प्रत्येक झोनमधील रंगछटा, त्यातील RGB मूल्यांचे पृथक्करण इत्यादी बाबीसुद्धा कॅमेर्याच्या मीटरींग सेन्सरमार्फत नोंदवल्या जातात आणि नंतर कॅमेर्याचे प्रोसेसिंग इंजिन व हजारो प्रतिमांचे विदागार (डेटाबेस) एकत्र मिळून योग्य एक्स्पोजर ठरवतात. या प्रकारच्या मीटरींगचा सर्वात मोठा उपयोग हा पोर्ट्रेट प्रकारच्या छायाचित्रणात होतो. 3D कलर मॅट्रिक्स मीटरींगमध्ये एखाद्या दृश्यात मानवी चेहरे आहेत की नाही हे ओळखून त्या चेहर्याचे मीटरींग अचूक करण्यात भर दिला जातो. यातील D म्हणजे विषयवस्तूचे कॅमेर्यापासूनचे अंतर लेन्समार्फत कॅमेर्याला पोहोचवले जाते. याचा अजून एक उपयोग म्हणजे थ्रू-द-लेन्स (टीटीएल) प्रकारच्या फ्लॅशमध्ये मल्टिझोन मीटरींग हे फ्लॅश किती प्रमाणात वापरायचा हे जास्त अचूकपणे ठरवते. याचे उदाहरण म्हणजे समजा तुम्ही एक पोर्ट्रेट शूट करत आहात. मॉडेल कॅमेर्याच्या जवळ आहे, पण पार्श्वभूमी ही गडद रंगाची व मॉडेलच्या बरीच मागे आहे. तुम्ही इन-कॅमेरा मीटरींग करण्यासाठी मॉडेलला फ्रेमच्या मध्यभागी ठेऊन आधी फोकस लॉक करता आणि मग फ्रेमिंग बदलून मॉडेल एका बाजूला येईल अशा पद्धतीने रीकंपोज करता व फोटो घेता. टीटीएल फ्लॅश एक्स्पोजरच्या काही मिलिसेकंद आधी काही प्री-फ्लॅशेस झळकावून त्यांचा परावर्तित प्रकाश लेन्समधून थेट कॅमेर्याच्या संवेदकावर टिपतात. त्यावरून विषयवस्तू नीट एक्स्पोज होतेय की नाही व फ्लॅश आउटपुटमध्ये किती सुधारणा करायची हे उरलेल्या क्षणिक वेळेत गणन करून प्रत्यक्ष एक्स्पोजरच्या वेळी अचूक फ्लॅश आउटपुट सोडले जाते. याला आयटीटीएल किंवा इन्टेलिजंट टीटीएल फ्लॅश असे म्हणतात. D प्रकारच्या लेन्समुळे विषयवस्तू नक्की किती लांब आहे आणि अॅम्बियंट लाइट किती आहे ह्याची अचूक माहिती आयटीटील यंत्रणेला (निकॉनच्या परिभाषेत सीएलएस - क्रिएटिव लाइटिंग सिस्टिम) पुरवली जाते.
कलर मॅट्रिक्स म्हणजे समोरील दृश्यातील सूक्ष्म रंगछटा एकमेकांपासून वेगवेगळ्या ओळखण्याची क्षमता. कृष्णधवल फिल्मपेक्षा रंगीत फिल्मची रंगभेदन क्षमता (टोनल रेंज) ही कमी असते. आणि रंगीत फिल्मपेक्षाही डिजिटल संवेदकांची टोनल रेंज कमी असते. दुसर्या शब्दांत, रंगभेदनातील सूक्ष्म बदल कृष्णधवल फिल्मवर जितक्या चांगल्या रीतीने टिपता येतात त्याच्या जवळपासही डिजिटल कॅमेरे जाऊ शकत नाहीत. मानवी डोळ्यांना कृष्णधवल फिल्मपेक्षाही जास्त रंगभेदन क्षमता लाभलेली आहे. त्यामुळेच कृष्णधवल छायाचित्रणासाठी काही छायाचित्रकार आजही मीडियम फॉरमॅट फिल्म कॅमेरा वापरण्यास प्राधान्य देतात. डिजिटल युगात पारंपारिक कृष्णधवल मीटरींगला पुरेशा टोनल रेंजच्या अभावामुळे काही मर्यादा येतात. कृष्णधवल मीटरींगमध्ये काही रंगछटा उदा. शुभ्र आणि फिकट पिवळा किंवा लाइट ग्रीन आणि ब्लू यांची टोनॅलिटी एकसारखी दिसू शकते. त्यामुळे अशा मीटरींगमध्ये उदाहरणार्थ हिमाचा शुभ्रपणा किंचित अंडरएक्स्पोज झाल्यामुळे प्रतिमेत काहीसा करडा येऊ शकतो. कलर मीटरींगमध्ये मात्र या छटांचे अचूक विश्लेषण करून योग्य उद्भासन शोधले जाते. निकॉन आणि इतर कॅमेर्यांमध्ये मीटरींगच्या बाबतीत हा फरक निकॉनला स्पर्धेत टिकवून ठेऊ शकला.
लेणी किंवा अशाच टोकाचे वैधम्र्य आणि आव्हानात्मक प्रकाशयोजनांच्या ठिकाणी पटापट प्रतिमा घ्यायला थ्री-डी कलर मॅट्रिक्स मीटरींग नक्कीच उपयोगी ठरते. विशेषतः अॅपर्चर प्रायोरिटी मोडमध्ये कॅमेरा ठेऊन, आयएसओ ४०० ते ६०० च्या टप्प्यात ठेऊन अशा प्रकारचे मीटरींग किमान वेळात कमाल छायाचित्रे अचूक उद्भासनासह घेण्यास मदत करते आणि तुम्हांला एक्स्पोजर कॉम्पेन्सेशनही फारसे वापरावे लागत नाही.
 थ्री-डी कलर मॅट्रिक्स मीटरींगचा वापर करून काढलेले पाषाणस्तंभांचे छायाचित्र
थ्री-डी कलर मॅट्रिक्स मीटरींगचा वापर करून काढलेले पाषाणस्तंभांचे छायाचित्र
मिडल ग्रे
'मिडल ग्रे' किंवा 'मध्यम करडा' ही संकल्पना पृष्ठभागाच्या प्रकाशमानतेशी संबंधित आहे. अगदी सोप्या भाषेत 'मिडल ग्रे' म्हणजे काळा आणि पांढरा या दोन टोकांच्या मधील रंग. 'मिडल' व 'ग्रे' या दोन शब्दांचा संबंध आन्सेल अॅडम्स आणि फ्रेड आर्चर यांच्याशी आहे. या दोघांनी मिळून १९३९-४० च्या सुमारास उद्भासन मापनाची 'झोन सिस्टिम' विकसित केली. तेव्हा छायाचित्रण हे कृष्णधवल होते म्हणून 'ग्रे' आणि शून्य ते दहा (रोमन अंकात 0, I, II,... ते IX, X) या अकरा 'Zones' पैकी मध्यभागी येणारा सहावा झोन Zone V म्हणून 'मिडल' असा याचा अर्थ आहे. छायाचित्रणामध्ये 'मिडल ग्रे' म्हणजे दृश्य प्रकाशात १८% इतका प्रकाश परावर्तित करण्याची क्षमता. याचमुळे ढोबळमानाने 'मिडल ग्रे'लाच 18% Gray असेही म्हणण्याची प्रथा पडली. अर्थात हल्लीचे आधुनिक कॅमेरे १८% करडा रंग न वापरता सुमारे १२ ते १३ टक्क्यांइतपत परावर्तनक्षमता संदर्भासाठी वापरतात.
 प्रतिमा विकिपीडियावरून साभार
प्रतिमा विकिपीडियावरून साभार
'मिडल ग्रे' चा मीटरींग मध्ये वापर
मीटरींग हे दोन प्रकारचे असते. रिफ्लेक्टेड म्हणजे पृष्ठभागावरून परावर्तित होणारा प्रकाश मोजणारे आणि इंन्सिडंट म्हणजे पृष्ठभागावर पडणारा प्रकाश मोजणारे. बहुतांशी हॅण्डहेल्ड आणि इन-कॅमेरा लाइट मीटर हे परावर्तित प्रकाश मोजण्यासाठी बनवलेले असतात. असे मीटर हे मध्यम-प्रकाशित म्हणजेच 'मिडल टोन' असणार्या विषयवस्तूंच्या पृष्ठभागावरून परावर्तित होणार्या प्रकाशाची तीव्रता मोजून उद्भासनाची आकडेमोड करण्यासाठी बनवलेले असतात. मध्यम स्वरूपाचा प्रकाश असताना सर्वसाधारणपणे लॅण्डस्केप प्रकारच्या दृश्यात बहुतांशी भाग हा मिडल टोन दाखवत असतो. त्याच चौकटीत जरी काही घटक गडद आणि काही प्रखर असले तरी या प्रतिमेचा स्तंभालेख हा उलट्या घंटेसारखा 'नॉर्मल डिस्ट्रिब्यूशन' दाखवेल. त्यामुळे अशा दृश्यांचे उद्भासन मापन हे त्यामानाने सोपे असते व ९५% मीटर अशा परिस्थितीत अचूक उद्भासन काढू शकतात. पण जर समोरचे दृश्य असे आहे की त्यात खूप गडद आणि खूप प्रखर घटकांचीच जास्त रेलचेल आहे, तर मग ऑटो मीटरींग गंडू शकते (खास पुणेरी शब्द!). मग अशा परिस्थितीत योग्य उद्भासन कसे ओळखायचे?
इथे मिडल ग्रे किंवा मिडटोन्स कामी येतात. तुम्हांला फक्त एवढेच करायचे आहे की समोरील दृश्यातील मध्यम प्रकाशित घटक ओळखायचेत, त्यांच्यावरून स्पॉट मीटरींगचे वाचन घेऊन उद्भासन काढायचेय आणि मुख्य विषयवस्तू गडद आहे की फिकट यावर एक्स्पोजर कॉम्पेन्सेशन ऋण किंवा धन ठेवायचे व रचनाविचार बदलून शटर रिलीज बटन दाबायचे. यातील प्रत्येक गोष्ट करायला फार गुंतागुंतीची वाटत असली तरी एकदा का चित्रचौकटीतील मिडलटोन्स ओळखता येऊ लागल्या आणि त्यांच्यावर स्पॉट मीटरींग करता येऊ लागले की तुम्ही फार पटापट फोटो काढत पुढे जाऊ शकता. (लेण्यांचे छायाचित्रण करताना हे लक्षात घ्या. कॅमेरा अॅपर्चर प्रायोरिटी किंवा प्रोग्रॅम्ड ऑटोवर ठेवा. समोरील परिदृश्य कृष्णधवल आहे अशी कल्पना करा. मग मूर्तीवरील मध्यम करडा भाग कुठे असेल हे शोधा. मग कॅमेर्यात मीटरींग मोड स्पॉट आहे याची खात्री करा. चौकटीत त्या करड्या भागावर संकेंद्रीकरण बिंदू ठेऊन शटर अर्धवट दाबा. एलसीडीत पहा उद्भासनाची मूल्यसंगती किती दिली आहे. मग त्या संख्या कॅमेर्यात नोंदवा. शटर इन्टर्वल स्लो वाटले आणि कॅमेरा हातात घेऊन छायाचित्रण करत असाल तर शटर इन्टर्वल फास्ट करा. शटर प्रायोरिटीवर कॅमेरा ठेऊन पुन्हा स्पॉट मीटरींग घेऊन पहा. मग एकदा प्रतिमा हलणार नाही व अंधुक/पांढरट येणार नाही याची खात्री झाल्यावर शॉट रि-कॉम्पोज करा म्हणजेच रचनाविचार मूळ चौकटीसारखा करून अंतिम छायाचित्र घ्या. आता प्लेबॅकमध्ये प्रतिमा पहा व काही बदल हवा असेल तर त्यानुसार एक्स्पोजर कॉम्पेन्सेशन कमीजास्त करून छायाचित्र काढत रहा. जोपर्यंत लेण्यांमधील प्रकाश बदलत नाही तोपर्यंत तुम्हांला उद्भासन त्रिकोणाची मूल्यसंगती बदलण्याची गरज नाही. याचा एकदा सराव झाला की तुम्ही वेगाने जास्तीत जास्त प्रतिमा घेऊ शकाल.)
तुमच्याकडे हातात धरून मीटरींग करायचा स्वतंत्र लाइट मीटर असेल तर मग अधिकच उत्तम. तुम्हांला सारखंसारखं रचनाविचार बदलत बसायची गरज नाही. एकतर कॅमेर्यातील स्पॉट मीटर हा सुमारे ३ ते ५ अंश इतका भाग मीटरींगसाठी विचारात घेतो. हॅण्डहेल्ड लाइट मीटरने तुम्हांला अर्धा ते एक अंश इतक्या छोट्या भागाचेही मीटरींग करता येते.
ग्रे कार्ड
समजा तुमच्या दृश्यात मिडलटोन असा काही भागच नसेल किंवा त्यावरून मीटरींग करायला तुम्हांला अडचणी येत असतील तर मग काय करायचे? अशा वेळी एक प्रमाणित करड्या रंगाचे कार्ड मिळते ते वापरावे. अशा प्रकारच्या कार्डची एक बाजू 18% करडी असते तर दुसरी बाजू संपूर्ण शुभ्र असते. याचा उपयोग म्हणजे करड्या बाजूवरून तुम्हांला मीटरींग करता येते आणि पांढर्या भागावरून शुभ्रसंतुलन (व्हाइट बॅलन्स) सुधारता येते. खालील प्रतिमेत 18% ग्रे, काळे आणि पांढरे कार्ड दिसताहेत.
 प्रतिमा आंतरजालावरून साभार
प्रतिमा आंतरजालावरून साभार
रिफ्लेक्टेड लाइट मीटर हे संपूर्ण दृश्यापैकी खूपच कमी भाग मीटरींगसाठी लक्षात घेतात - अर्धा ते एक अंश. इन्सिडंट लाइट मीटर हे सुमारे १८० अंश पाहू शकतात. रिफ्लेक्टेड लाइट मीटर हे फक्त मीटरींग केल्या जाणार्या छोट्याशा पृष्ठभागावरून परावर्तित होणारा प्रकाशच विचारात घेतात. तसेच रिफ्लेक्टेड मीटर हे इतर घटक लक्षात घेत नाहीत. रंगभेद, रंगछटा, वैधम्र्य, प्रखरता, पार्श्वभूमीची प्रकाशमानता, पोत, आकार इत्यादी घटकांमध्ये जर टोकाचे वैविध्य असेल तर असे मीटर चुकीचे रीडिंग देऊ शकतात. दुसरे असे की हे मीटर मध्यम करड्या टोनॅलिटीवरून मीटरींग करण्यासाठी बनवलेले असतात. म्हणजेच मीटरींग केला जाणारा पृष्ठभाग हा मध्यम प्रकाशमानतेचा आहे असे गृहित धरून त्यांचे गणित काम करते. मध्यम प्रकाशमानतेचा पृष्ठभाग म्हणजे एकतर कमी प्रकाशातील फिकट रंगाचा पृष्ठभाग असू शकतो किंवा जास्त प्रकाशातील गडद रंगाचा पृष्ठभाग असू शकतो. कृष्णधवल प्रकारात दोन्ही सारख्याच रंगछटेचे दिसतात. म्हणूनच रिफ्लेक्टेड मीटरींग हे गडद अथवा प्रखर भागावर केल्यास चुकू शकते. इन्सिडंट म्हणजे 'घडणारा'. या प्रकारात प्रकाश हा विषयवस्तूवर पडायच्या आत मोजला जातो आणि त्यात वर दिलेले इतरही घटक येतात. त्यामुळे चित्रचौकटीतील घटक बदलत राहिले तरी इन्सिडंट लाइट मीटर हे जास्त एकजिनसी व सुसंगत वाचन देऊ शकतात. यामुळे व्यावसायिक छायाचित्रणात आणि चलच्चित्रिकरणात (फिल्म शूटिंग) इन्सिडंट लाइट मीटर जास्त वापरले जातात. या लाइट मीटरसाठी मिडल ग्रे कार्डाची गरज पडत नाही. तुमच्याकडे इन्सिडंट लाइट मीटर असेल तर लेण्यांसारख्या आव्हानात्मक ठिकाणी अचूक प्रतिमा घेणे अजून सोपे जाते.
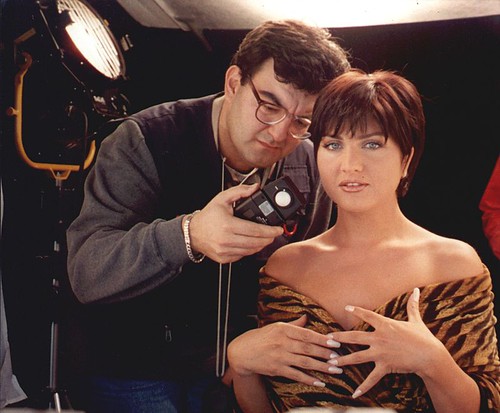 लाइट मीटरचा वापर. मूळ प्रतिमा 'Erkan Umut shoots Sibel Can'. प्रतिमा विकिपीडियावरून साभार
लाइट मीटरचा वापर. मूळ प्रतिमा 'Erkan Umut shoots Sibel Can'. प्रतिमा विकिपीडियावरून साभार
उद्भासन समायोजन
 पॉइंट-अॅण्ड-शूट कॅमेर्यांमधील उद्भासन समायोजन
पॉइंट-अॅण्ड-शूट कॅमेर्यांमधील उद्भासन समायोजन
उद्भासन समायोजन म्हणजेच एक्स्पोजर कॉम्पेन्सेशन. आता मीटरींगसाठी एवढी यातायात करूनही परत एक्स्पोजर मूल्य कॉम्पेन्सेट का करायचे? कॅमेरा किंवा हॅण्डहेल्ड मीटर कितीही अचूक असला तरी काही परिस्थितीत मीटरला त्याचे प्रमाणित गणित बदलायला सांगावे लागते. कारण मीटरने दाखवलेले वाचन हे त्या मीटरच्या अल्गोरिदमच्या दृष्टीने अचूक असते. पण छायाचित्रकाराला त्या मूल्यसंगतीने हवी तशी प्रतिमा मिळेलच असे नाही. याचे एक उदाहरण म्हणजे कित्येकदा ऑटो किंवा प्रोग्रॅम्ड ऑटो मोडवर कॅमेरा ठेऊन हलत्या वस्तूंच्या प्रतिमा घेतल्यास किंवा कमी प्रकाशात ट्रायपॉडसारखा आधार न वापरता कॅमेरा हातात धरून प्रतिमा घेतल्यास त्या धूसर येतात. कारण कॅमेर्याने स्लो शटर इन्टर्वल गृहित धरलेले असते. मग अशावेळी जर आयएसओ वाढवला तर नॉइज वाढण्याची शक्यता असेल आणि लेन्सचे कमाल अॅपर्चर हे पुरेसे फास्ट नसेल तर स्लो शटर इन्टर्वल ठेऊन कदाचित प्रतिमा पुरेशी प्रकाशित होईल, पण मोशन ब्लरमुळे ती धूसर येईल. या परिस्थितीत तुम्ही A किंवा Av मोडऐवजी S किंवा Tv म्हणजेच शटर प्रायोरिटी मोडवर कॅमेरा ठेऊन एक्स्पोजर कॉम्पेन्सेशन हे ऋण ठेऊ शकता. त्यामुळे कॅमेर्याला तुम्हांला प्रतिमा गडद हवी आहे असा संदेश मिळून तो त्याप्रमाणे फास्ट शटर इन्टर्वल ठेऊ शकतो. नंतर प्रतिमाप्रक्रियेत तुम्ही गडद आलेल्या प्रतिमेला नॉइज वाढू न देता पुनःश्च प्रखर करू शकता. हा एक्स्पोजर कॉम्पेन्सेशनचा एक फायदा आहे.
 ऋण आणि धन उद्भासन समायोजन. -2EV ला फिकट गुलाबी फूल योग्य उद्भासित झाले आहे तर +2EV ला गडद लाल फूल योग्य उद्भासित झाले आहे.
ऋण आणि धन उद्भासन समायोजन. -2EV ला फिकट गुलाबी फूल योग्य उद्भासित झाले आहे तर +2EV ला गडद लाल फूल योग्य उद्भासित झाले आहे.
दुसरा फायदा असा की काहीकाही कॅमेरे जात्याच सर्व प्रतिमा किंचित ओवर किंवा अंडरएक्स्पोज करतात. त्यामुळे अशा कॅमेर्यांमध्ये + किंवा - EV डायल करून कस्टम सेटिंगने योग्य उद्भासन मिळवता येते. अजून एक बाब म्हणजे कॅमेर्याची रंगभेदन क्षमता (टोनल रेंज) कमी असेल तर टोकाचे वैधम्र्य असणार्या विषयवस्तूंच्या बाबतीत उद्भासन समायोजन करून हवे तसे वैधम्र्य (कॉन्ट्रास्ट) मिळवता येते, तसेच सूक्ष्म रंगभेद प्रतिमेत पकडता येतात. वर दिलेल्या ग्रे कार्डाच्या बाबतीतही जर कॅमेरा आपल्याला हवे तसे मीटरींग करत नसेल तर उद्भासन समायोजन करावे लागते. उदा. समुद्रकिनार्यावरील पांढर्याशुभ्र फेनमयी लाटांचे उद्भासन योग्य येण्यासाठी धनात्मक उद्भासन समायोजन करावे लागेल कारण कॅमेरा हमखास अशा लाटांना शुभ्र दाखवण्याऐवजी किंचित गडद निळसर करड्या दाखवेल. तसेच गडद रंगाची त्वचा असणार्यांसाठी कदाचित ऋणात्मक समायोजन वापरावे लागेल.
मॅन्युअल मोडमध्ये उद्भासन समायोजनाचे काय काम? या मोडमध्ये आयएसओ, अॅपर्चर, शटर इन्टर्वल इत्यादी तुम्हीच सांगत असल्याने कॅमेर्याकडे फक्त तुमची मूल्यसंगती कमी आहे की जास्त आहे हे सुचवण्याचे काम उरते. या मोडमध्ये हायलाइट ब्लिंकिंग, हिस्टोग्राम आणि एक्स्पोजर बार यांचा वापर करून तुम्ही कॅमेरा तुमच्या मूल्यसंगतीचे विश्लेषण कसे करतोय याचा पडताळा घेऊ शकता.
मीटरींग आणि आय-टीटीएल फ्लॅश
TTL TTL म्हणजेच थ्रू-द-लेन्स. प्रतिमा घेतेवेळी म्हणजेच उद्भासन चालू असताना लेन्समधून फिल्मवर पडणारा प्रकाश परावर्तित होतो. फिल्मजवळचा एक फ्लॅश संवेदक हा प्रकाश सतत मोजत राहून त्यानुसार फ्लॅशची तीव्रता म्हणजेच फ्लॅश आउटपुट किती ठेवायचे हे ठरवतो. हे झाले फिल्म एसएलआरबाबत.
D-TTL डी-टीटीएल म्हणजे टीटीएलची डिजिटल आवृत्ती. पण डिजिटल संवेदक हे फिल्मइतका प्रकाश परावर्तित करत नसल्याने त्यांच्यावरून परावर्तित होणारा प्रकाश मोजून फायदा नसतो. म्हणून प्रत्यक्ष उद्भासन सुरू व्हायच्या केवळ काही क्षण आधी 'मॉनिटर प्री-फ्लॅशेस' हे कमी तीव्रतेचे फ्लॅश बर्स्ट मारले जातात व त्यांच्यापासून येणारा प्रकाश हा शटर पडद्यावरून मोजून मग फ्लॅश आउटपुट आपोआप ठरवले जाते. (लक्षात घ्या, शटर अजून उघडले नाहीये.)
i-TTL आय-टीटीएल ही डी-टीटीएलची सुधारीत आवृत्ती. यात फक्त प्री-फ्लॅशेसची तीव्रता जास्त असते आणि प्री-फ्लॅशेसचा कालावधी आणखी कमी केलेला असतो.
3D Multi-Sensor balanced fill-flash TTL यात आय-टीटीएल प्रकारेच अधिक परिणामकारक प्री-फ्लॅशेस वापरले जातात. पण त्याचबरोबर यात लेन्सकडून कॅमेर्याला पोहोचवली जाणारी 'डिस्टन्स-टू-सब्जेक्ट' माहिती म्हणजेच विषयवस्तूचे कॅमेर्यापासूनचे अंतर आणि लेन्स कुठल्या अंतरावर संकेंद्रित केलीय ते नाभीय अंतर वापरले जाते. याचा उपयोग करून चित्रचौकटीत मध्यभागी नसलेल्या विषयवस्तू, लहान विषयवस्तू, प्रखर पार्श्वभूमीवरील गडद विषयवस्तू अशा खूपशा आव्हानात्मक दृश्यांचे अचूक उद्भासन केले जाते. याला थ्री-डी असे म्हणतात कारण यात कॅमेर्याचे मीटरींग, प्री-फ्लॅश रीडींग आणि डिस्टन्स-टू-सब्जेक्ट या तीन घटकांचा विचार केला जातो. निकॉनच्या थ्री-डी कलर मॅट्रीक्स मीटरींगला उत्तर म्हणून कॅननने त्यांच्या E-TTL II मीटरींगमध्ये याच तंत्रज्ञानाचा वापर करायला सुरुवात केली.
हा भाग फारच विस्तृत आणि तांत्रिक झाला आहे. तरी मी माझ्यापरीने विषय जास्तीत जास्त सोपा करून सांगायचा प्रयत्न केला आहे. यात जसे नवोदितांना मीटरींगची ओळख होईल तसेच जाणत्यांनाही त्यातील खाचाखोचा नव्याने समजतील अशी मांडणी केली आहे. आपले बहुमोल अभिप्राय अवश्य कळवावेत. या लेखमालेची कुणाला आपले छायाचित्रण कौशल्य थोडेसेसुद्धा सुधारायला मदत झाल्यास मला हे कष्ट कृतार्थ झाल्याचे समाधान मिळेल. नेहमीप्रमाणेच आपल्या शंका धाग्यावरच किंवा जास्तीत जास्त खरडवहीतून विचाराव्यात ही विनंती.
जाताजाता
There was this photographer in one of the most remote parts of the African continent on an assignment. He came across a primitive village where the residents were living in thatched huts and wearing colorful primitive garments. He approached a man who appeared to be the chief who was wearing a large headdress made of woven hemp and colorful feathers.
The photographer, not knowing how to speak to him, pointed to his camera then to the chief. The chief nodded. As the photographer was taking a meter reading the chief said "today use f/16 at 1/125 for ISO 100 film." ... ;-)
उदाहरण १.
उदाहरण २.
इथे गडद, प्रखर व मध्यम टोनच्या घटकांचा प्रतिमाचौकटीत योग्य समावेश होता. तरीही तिच्या चेहर्यावरील टोनल डिटेल्स व्यवस्थित यावेत यासाठी -2/3 EV इतके उद्भासन समायोजन कमी केले व मॅट्रिक्स मीटरींग ठेवले. आधी f/1.8 पासून सुरुवात करून शेवटी सर्व चेहरा नीट फोकसमध्ये यावा यासाठी f/5.6 इतकी लेन्स स्टॉप-डाउन केली. अॅपर्चर प्रायोरिटीमध्ये मग अंतिम प्रतिमा घेतली. उद्भासन समायोजन किंचित ऋण ठेवले नसते तर चेहर्याची टोनॅलिटी जपण्याऐवजी कॅमेर्याने तिच्या कपड्यांची व बनीची टोनॅलिटी उद्भासित केली असती व चेहरा थोडा ओवरएक्स्पोज झाला असता. किंचित अंडरएक्स्पोज प्रतिमेतील शॅडो डिटेल्स मिळवणे त्यामानाने सोपे असते पण ब्लोआउट झालेल्या ओवरएक्स्पोज प्रतिमेतील हायलाइट्स पुन्हा आणणे कठीण असते.
ग्रे कार्ड वापरण्याच्या बर्याच पद्धती आहेत. त्यातल्या त्यात सोपी पद्धत खाली देत आहे. १. ग्रे कार्ड तुमच्या विषयवस्तूवर जो प्रकाश पडत आहे त्याच प्रकाशात असायला हवे. कॅमेरा स्पॉट किंवा पार्शल मीटरींग मोडमध्ये ठेवा. A Priority किंवा S Priority मोड जो हवा तो निवडून ठेवा. २. विषयवस्तूवर लेन्स संकेंद्रीत करा व फोकस लॉक करून ठेवा. ३. ग्रे कार्ड विषयवस्तू जवळ असेल तर विषयवस्तूच्याच प्रतलात शेजारी तुमच्या सहाय्यकाला धरायला सांगा. किंवा स्वतः हातानेच कॅमेर्याच्या समोर थोडे लांब धरा. ४. ग्रे कार्डची दिशा - कॅमेर्याकडे असायला हवी. प्रकाश खूपच बाजूने येत असेल व तुम्हांला विषयवस्तूची प्रकाशाकडील बाजूच उद्भासित करायची असेल तर ग्रे कार्डही त्याच कोनात धरा. समजा सावलीतली बाजू उद्भासित करायची असेल तर ग्रे कार्ड प्रकाशाच्या दिशेला त्याप्रमाणात तिरपे येईल असे धरा. उदा. बॅकलिट पोर्ट्रेटमध्ये प्रकाश विषयवस्तूच्या मागून आणि कॅमेर्याच्या थेट समोरून येतो. तेव्हा ग्रे कार्डही विषयवस्तूप्रमाणेच प्रकाशाच्या उलट धरले पाहिजे. ५. चित्रचौकटीत ग्रे कार्ड योग्य पद्धतीने आले की कॅमेर्याचा मीटर काय वाचन दर्शवतोय ते पहा व मॅन्युअल मोडमध्ये जाऊन शटर इन्टर्वल/अॅपर्चर तसे सेट करा. ६. ग्रे कार्ड बाजूला करा व छायाचित्र घ्या. ग्रे कार्डवर फोकस करू नका. स्पॉट मीटरींग वापरत असाल तर ग्रे कार्ड व्ह्यूफाइंडरच्या मधोमध आले पाहिजे. नाहीतर कॅमेरा चित्रचौकटीत ग्रे कार्ड असूनही भलतीकडेच मीटरींग करत बसेल. हे टाळण्यासाठी आधी ग्रे कार्डवर मीटरींग करून घ्या व मग कॉम्पोझिशन किंचित बदलून छायाचित्र घ्या. हे सगळं वाचताना अवघड वाटेल, पण एकदा सराव झाला की अजिबात न चुकता तुम्ही मीटरींग स्वतःचे स्वतःच करू लागाल.